动手学ROS2 (9.5)Gazebo仿真插件之IMU
本文最后更新于 2025-02-10,文章内容可能已经过时。
惯性测量单元IMU
惯性测量单元是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。在导航中有着很重要的应用价值。
上面这段话是小鱼从百科中摘抄出来的,你需要知道的一个关键点是IMU可以测量以下三组数据:
三维角度
三维加速度
三维角速度
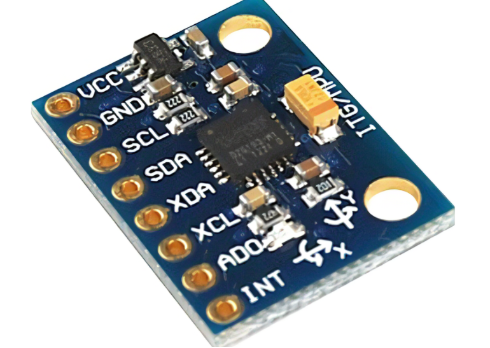
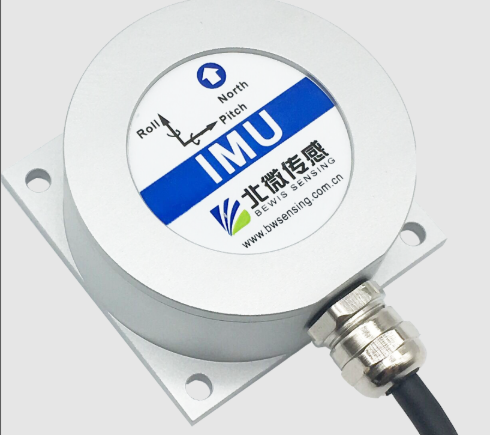
常见IMU
Gazebo-IMU插件介绍
仿真的IMU也是对应一个后缀为.so的动态链接库,使用下面的指令可以查看所有的动态链接库:
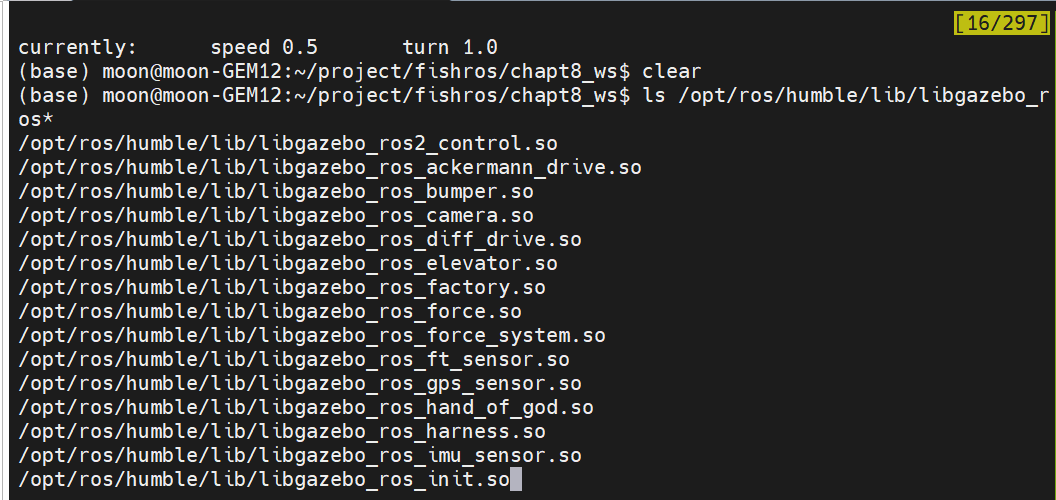
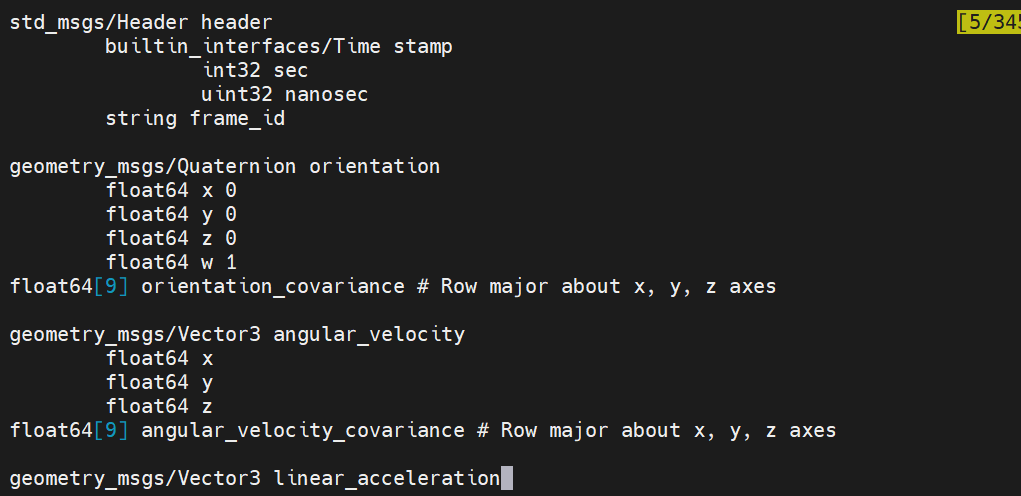
IMU对应的消息类型为sensor_msgs/msg/Imu
给FIshbot配置IMU传感器
有了上节课的经验,我们可以很轻松的添加IMU传感器,但是还有一个需要注意的地方,为了更真实的模拟IMU传感器,我们需要给我们的仿真IMU传感器加点料。
加什么?加点高斯噪声,高斯噪声只需要指定平均值和标准差两个参数即可,不过因为IMU传感器的特殊性,我们还需要给模型添加两个偏差参数,分别是 平均值偏差和标准差偏差。
有关Gazebo仿真和噪声模型更深入的介绍可以参考小鱼发的两篇推文:
下面是IMU传感器的URDF配置代码,大家结合文章对应可以理解一下,IMU对应的插件库libgazebo_ros_imu_sensor.so
<gazebo reference="imu_link">
reference="imu_link":指定这个配置是针对机器人模型中的imu_link链接。imu_link是机器人模型中用于表示 IMU 传感器位置和方向的虚拟链接。
<sensor name="imu_sensor" type="imu">
name="imu_sensor":传感器的名称,这里是imu_sensor。type="imu":传感器的类型,这里是 IMU(惯性测量单元)。
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
filename="libgazebo_ros_imu_sensor.so":指定插件的共享库文件名。这个文件是 Gazebo 和 ROS 之间的桥梁,用于将 IMU 数据发布到 ROS 话题。name="imu_plugin":插件的名称,这里是imu_plugin。
<ros>
<namespace>/</namespace>:ROS 命名空间,默认为根命名空间/。<remapping>~/out:=imu</remapping>:将插件内部的~/out话题重映射为 ROS 的imu话题。这意味着插件会将 IMU 数据发布到/imu话题。
<initial_orientation_as_reference>false</initial_orientation_as_reference>
false:表示不将初始方向作为参考方向。这意味着 IMU 数据将直接反映传感器的绝对方向,而不是相对于初始方向的变化。
<always_on>true</always_on>
true:表示传感器始终处于开启状态。
<update_rate>100</update_rate>
100:传感器的更新频率,单位为 Hz。这里设置为每秒更新 100 次。
<visualize>true</visualize>
true:表示在 Gazebo 的可视化窗口中显示传感器的模型。
<imu>
<angular_velocity>:定义角速度的噪声特性。<x>、<y>、<z>:分别定义绕 x、y、z 轴的角速度噪声。<noise type="gaussian">:噪声类型为高斯噪声。<mean>:噪声的均值,这里是 0.0。<stddev>:噪声的标准差,这里是 2e-4。<bias_mean>:偏置的均值,这里是 0.0000075。<bias_stddev>:偏置的标准差,这里是 0.0000008。
<linear_acceleration>:定义线性加速度的噪声特性。<x>、<y>、<z>:分别定义沿 x、y、z 轴的线性加速度噪声。<noise type="gaussian">:噪声类型为高斯噪声。<mean>:噪声的均值,这里是 0.0。<stddev>:噪声的标准差,这里是 1.7e-2。<bias_mean>:偏置的均值,这里是 0.1。<bias_stddev>:偏置的标准差,这里是 0.001。
将上面的代码加到fishbot_gazebo.urdf中,接着我们就可以进行测试了。
编译测试
运行
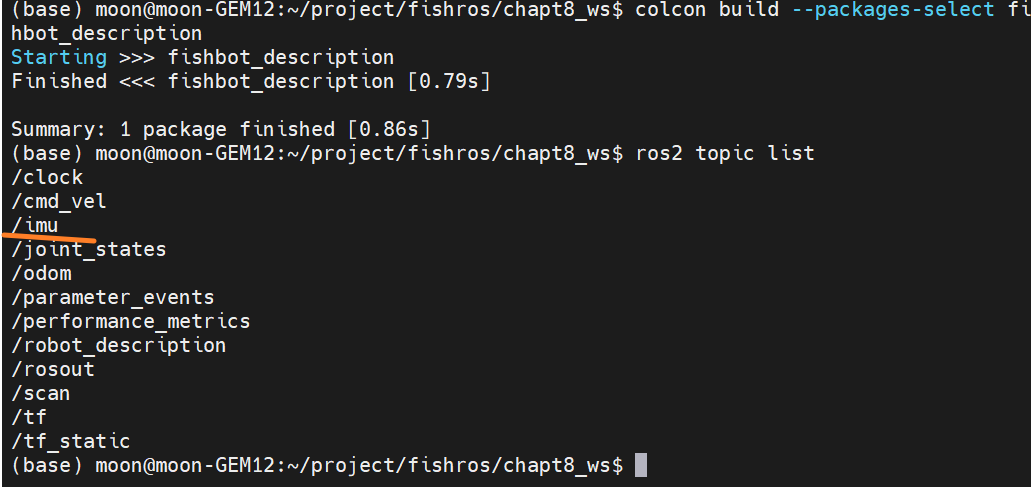
查看话题

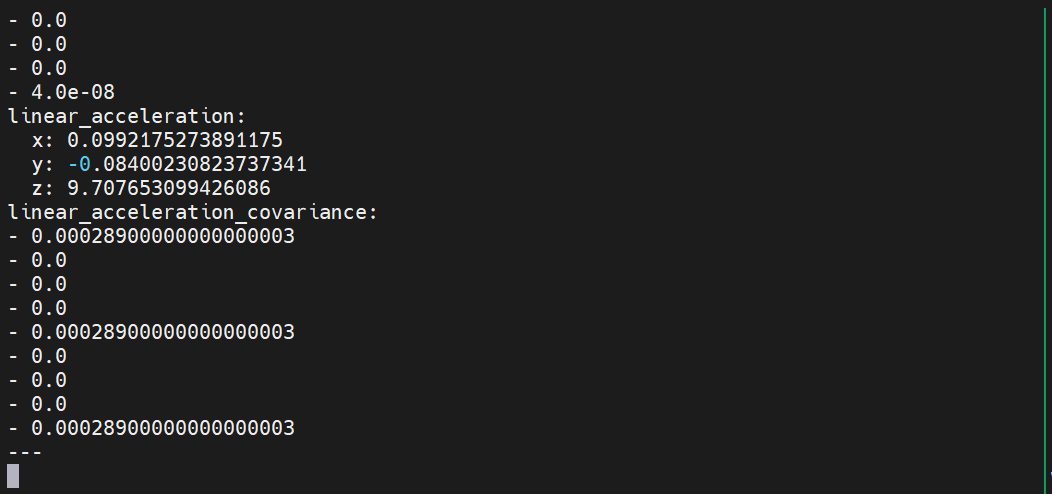
输出话题
用rqt可视化

总结
本节我们对IMU传感器进行介绍,并通过gazbeo的imu插件完成了fishbot的IMU数据的输出。
最后还有小练习等着你:
再次启动遥控节点,控制fishbot,观察IMU传感器的数据变化
- 感谢你赐予我前进的力量
-
微信
- 支付宝