
动手学ROS2 (9.3)Gazebo加载机器人模型URDF
本文最后更新于 2025-02-09,文章内容可能已经过时。
Gazebo-ROS2插件
在第六章中小鱼曾介绍过,gazebo是独立于ROS/ROS2之外的仿真软件,我们可以独立使用Gazebo。如果我们想要通过ROS2和Gazebo进行交互,需要通过gazebo_ros插件来进行。
接下来小鱼先带你通过命令行的形式来启动gazebo-ros2插件以及使用插件提供的服务来将fishbot的urdf模型在gazebo中显示出来。
安装Gazebo插件
sudo apt install ros-humble-gazebo-ros启动Gazebo并启动插件
安装完成后,我们就可以通过下面的命令行来启动gazebo并加载ros2插件
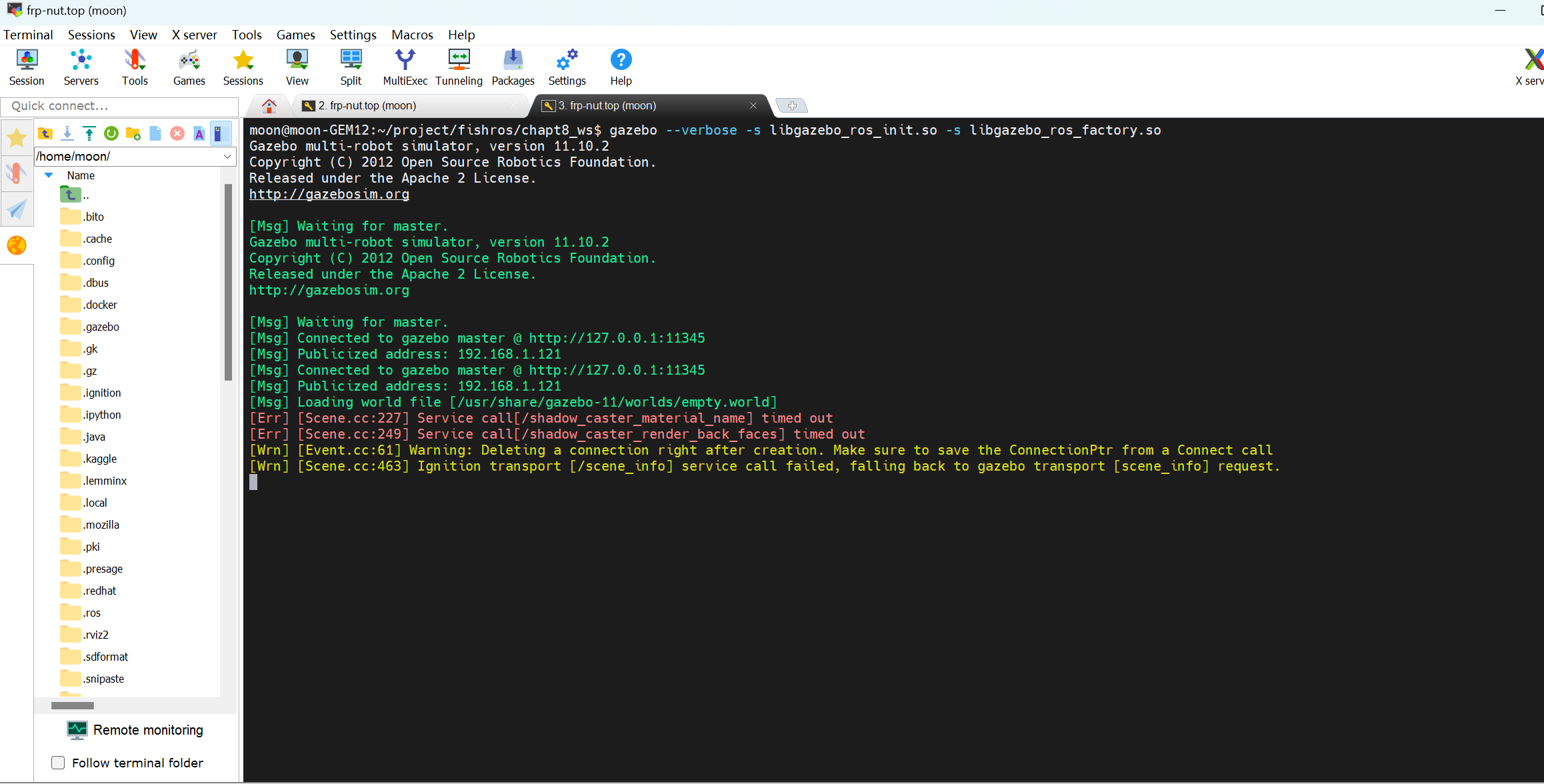
gazebo --verbose -s libgazebo_ros_init.so -s libgazebo_ros_factory.so 看到下面的日志和Gazebo界面代表启动成功
插件节点及其服务
使用3.1中的指令启动Gazebo并加载gazebo_ros插件,我们使用下面的指令来看插件的节点,以及改节点为我们提供的服务有哪些?
节点列表
ros2 node list
然后我们看看这个节点对外提供的服务有哪些?
ros2 service list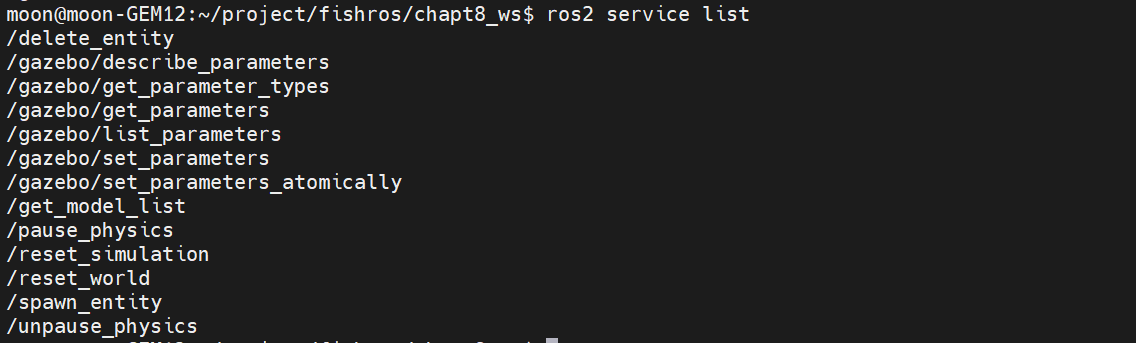
除去和参数相关的几个服务,我们可以看到另外三个特殊服务:
/spawn_entity,用于加载模型到gazebo中
/get_model_list,用于获取模型列表
/delete_entity,用于删除gazbeo中已经加载的模型
我们想要让gazebo显示出我们配置好的fishbot使用/spawn_entity来加载即可。
接着我们可以来请求服务来加载模型,小鱼先带你看一下服务的接口类型。
ros2 service type /spawn_entity
ros2 interface show gazebo_msgs/srv/SpawnEntity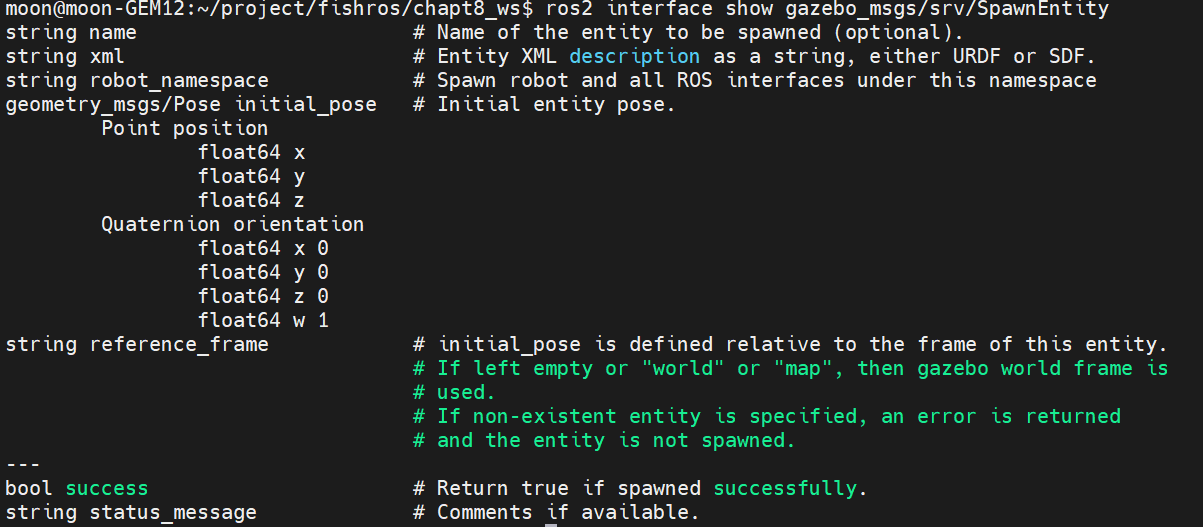
可以看到服务的请求内容包括:
string name ,需要加载的实体的名称 (可选的)。
string xml ,实体的XML描述字符串, URDF或者SDF。
string robot_namespace ,产生的机器人和所有的ROS接口的命名空间,多机器人仿真的时候很有用。
geometry_msgs/Pose initial_pose ,机器人的初始化位置
string reference_frame ,初始姿态是相对于该实体的frame定义的。如果保持"empty"或"world"或“map”,则使用 gazebo的world作为frame。如果指定了不存在的实体,则会返回错误
调用服务加载模型
看到这里你是不是迫不及待敲起来命令行来加载我们的机器人到gazebo了,别着急,小鱼再推荐一个可视化服务请求工具,其实在第六章中小鱼介绍过,在rqt工具集里有一个叫服务请求工具。
命令行输入rqt,在插件选项中选择Services->Service Caller,然后再下拉框选择/spawn_entity服务,即可看到下面的界面。
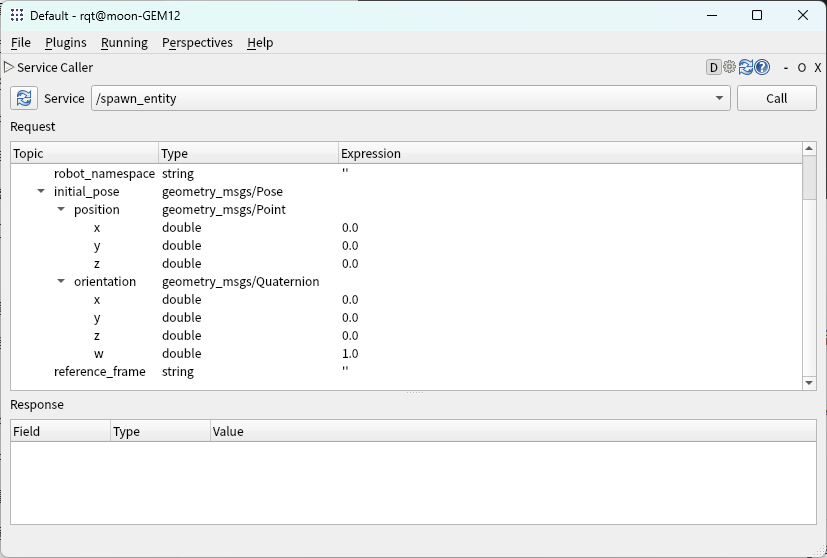
接着我们把我们的FishBot的URDF模型复制粘贴,放到xml中(注意要把原来的''删掉哦!),然后拿起我们的小电话,和小鱼一起Call。
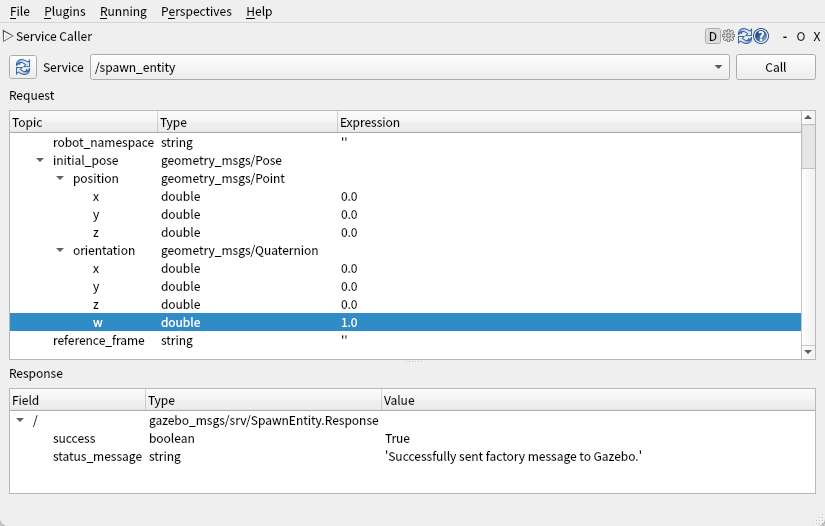
此时再看我们的Gazebo,一个小小的,白白的机器人出现了。
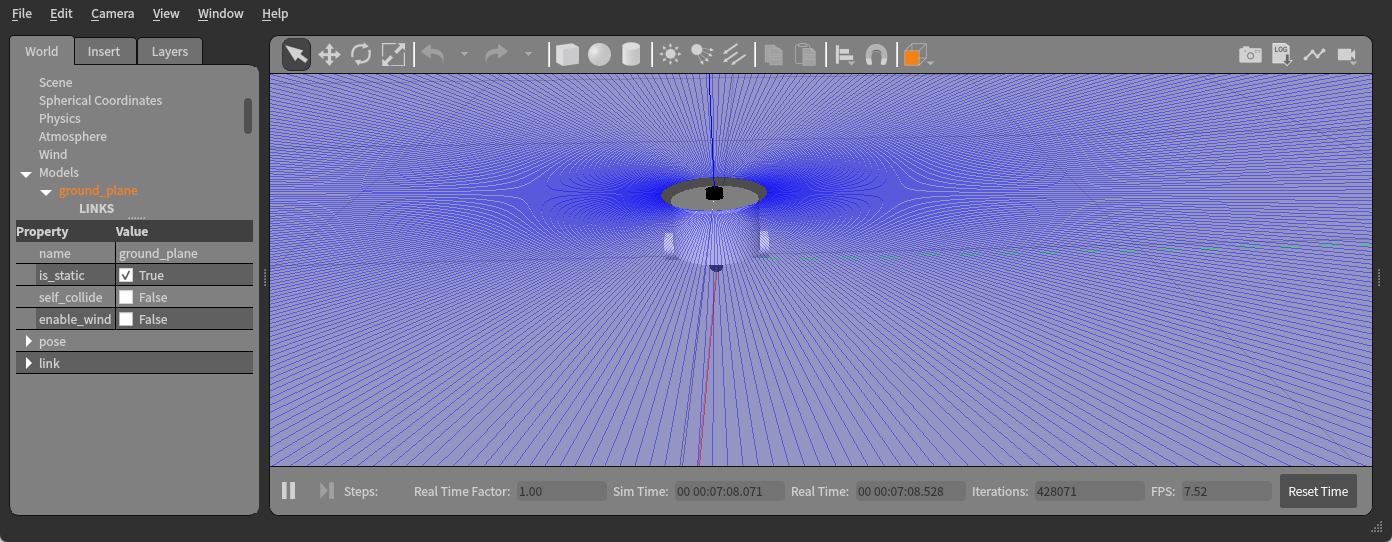
按住Shift加鼠标左键,拖动一下,来好好的欣赏欣赏我们的机器人。
在不同位置加载多个机器人
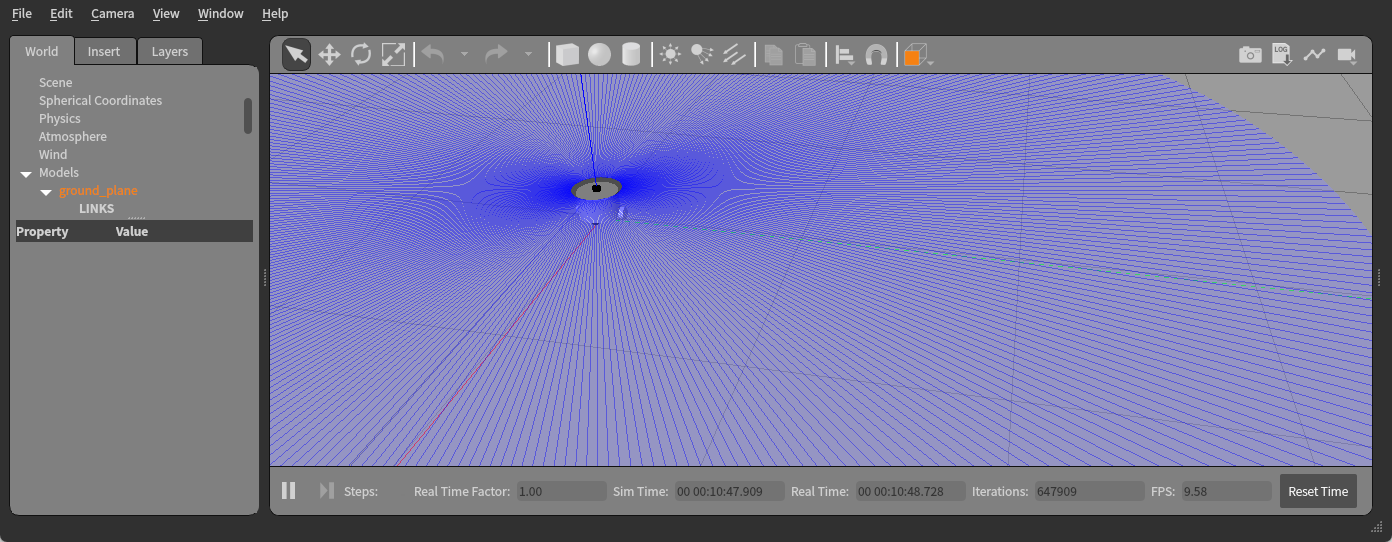
欣赏完毕后,小鱼再带你生产一个fishbot(为了后面需要多机器人仿真的小伙伴)。
修改rqt中的参数,增加一个命名空间,然后修改一个位置,让第二个机器人和第一个相距1m的地方生产,然后点击Call。
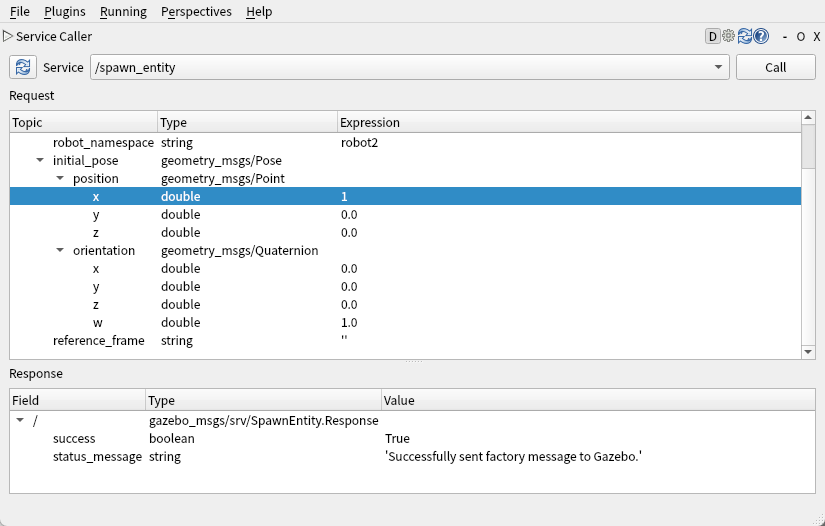
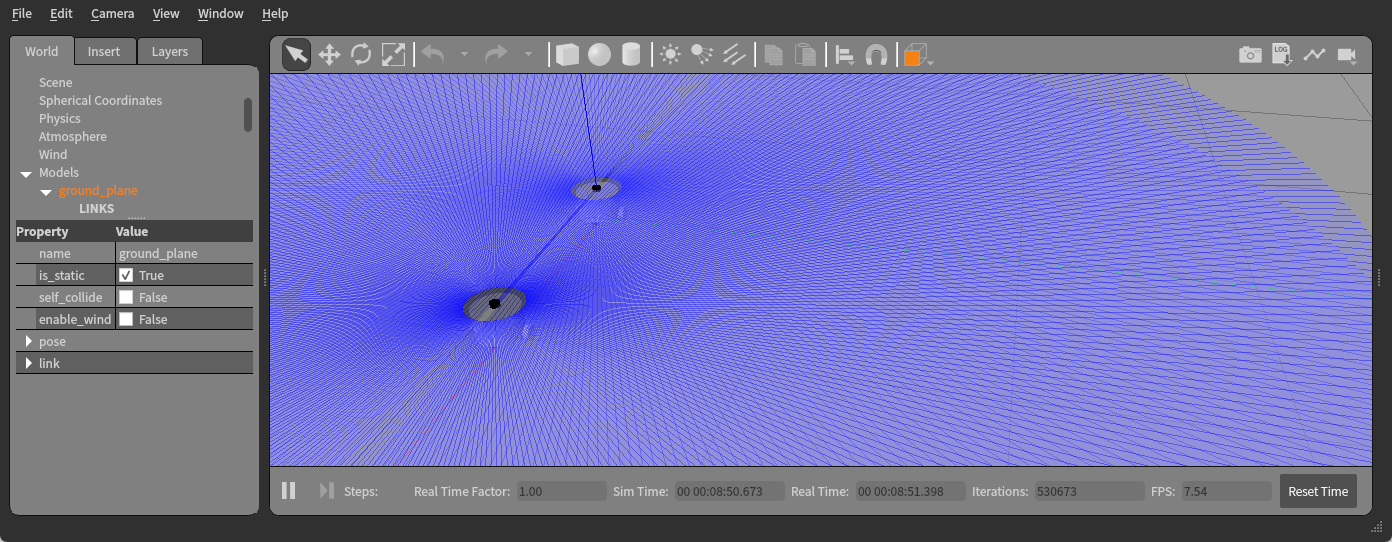
返回成功,此时拖送Gazebo观察一下,发现多出了一个机器人,距离刚好是在X轴(红色)1米(一个小格子一米)处。
查询和删除机器人
利用rqt工具,我们再对另外两个服务接口进行请求。
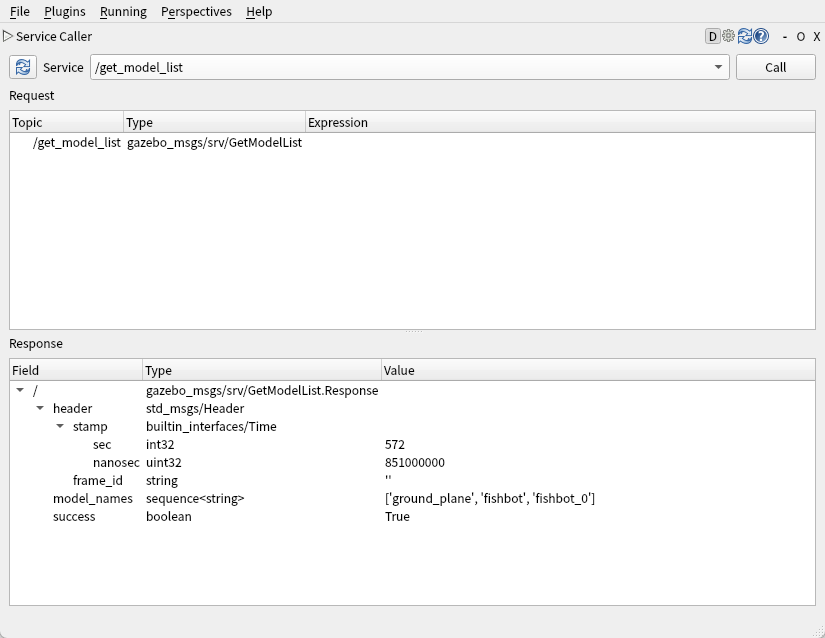
查到了三个模型,一个大地,一个fishbot,一个fishbot_0。
我们接着尝试把fishbot_0删掉,选择删除实体,输入fishbot_0的名字,拿起小电话通知工厂回收我们的0号fishbot。
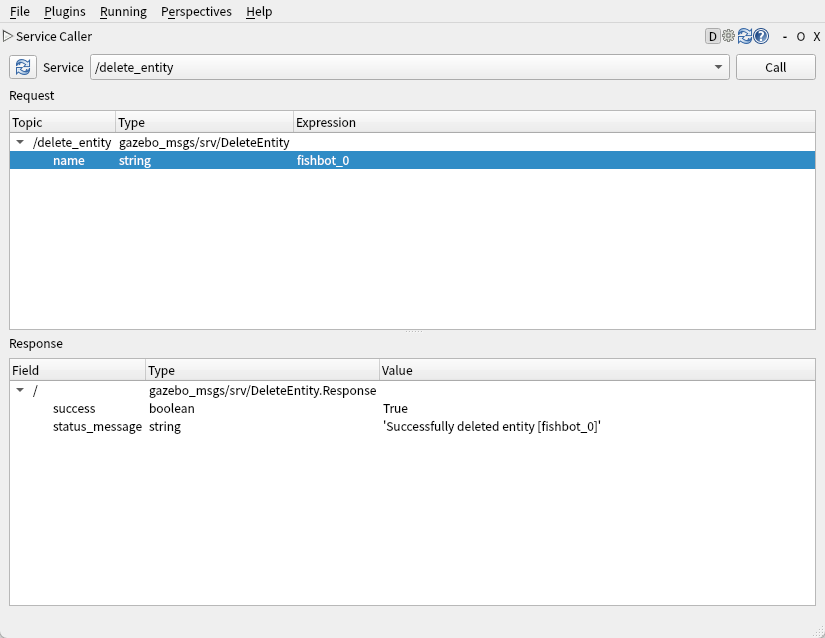
调用成功,观察gazebo发现机器人没了
将启动gazebo和生产fishbot写成launch文件
打开fishbot工作空间,在src/fishbot_description/launch中添加一个gazebo.launch.py文件,我们开始编写launch文件来在gazebo中加载机器人模型。
启动gazebo,我们可以将命令行写成一个launch节点
ExecuteProcess(
cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so', gazebo_world_path],
output='screen')上面我们加载机器人是直接将XML格式的URDF复制过去进行加载的,这样很不方便,我们可以使用gazebo_ros为我们提供好的一个叫做spawn_entity.py节点,该节点支持从文件地址直接生产机器人到Gazebo。
其实该节点的原理也很简单,从URDF中读取机器人模型,然后再调用服务,和我们手动操作一个样子,小鱼只道没差别。
该节点需要两个参数,一个机器人的模型名字和urdf的文件地址,这个简单,前面我们曾经使用package_share来拼接过urdf路径。
spawn_entity_cmd = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')最终写好的launch文件如下:
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
robot_name_in_model = 'fishbot'
package_name = 'fishbot_description'
urdf_name = "fishbot_gazebo.urdf"
ld = LaunchDescription()
pkg_share = FindPackageShare(package=package_name).find(package_name)
urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')
# Start Gazebo server
start_gazebo_cmd = ExecuteProcess(
cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so'],
output='screen')
# Launch the robot
spawn_entity_cmd = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')
ld.add_action(start_gazebo_cmd)
ld.add_action(spawn_entity_cmd)
return ld编译运行
colcon build --packages-select fishbot_description
source install/setup.bash
ros2 launch fishbot_description gazebo.launch.py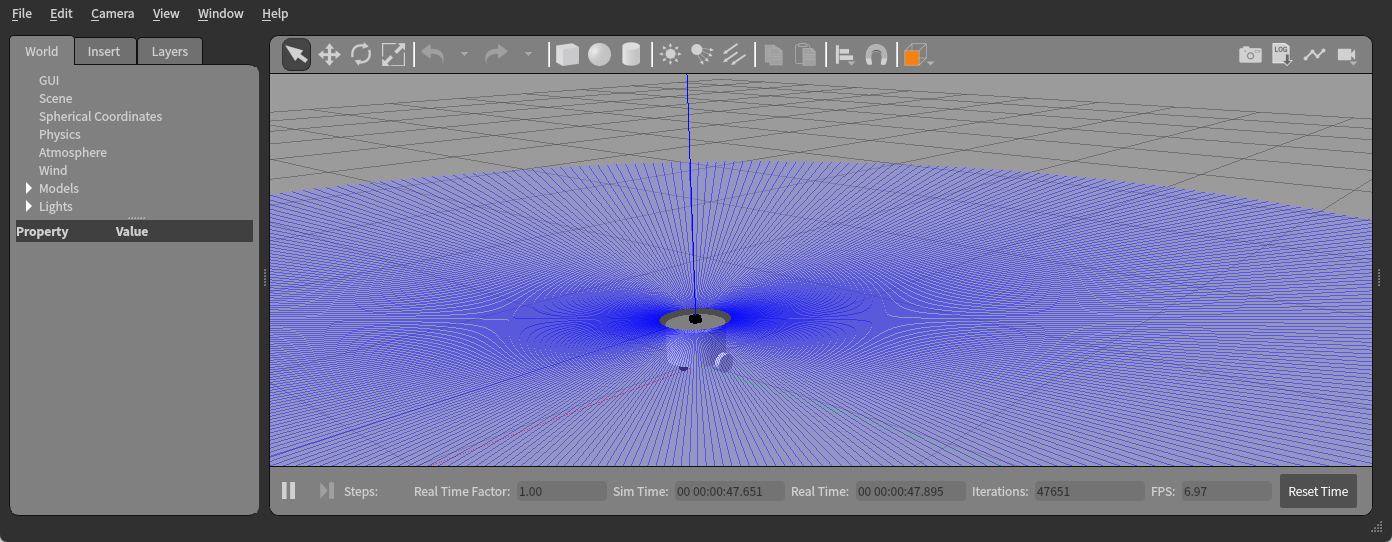
总结
这节课我们为Fishbot注入了仿真必须的物理属性,但是机器人还是不会动,下一节课我们就利用Gazebo的其他插件,让我们的机器人动起来。
最后再留一个课后作业:
尝试将fishbot的物理属性去掉,再加载机器人看看会发生什么?
尝试将fishbot的碰撞改成很小,再看看会发生什么?
gazebo还支持link的材料修改,在URDF中添加下面的代码,给支撑轮一个不一样的材质吧,你也可以将reference改成其他link,装点一下你的机器人。
<gazebo reference="caster_link">
<material>Gazebo/Black</material>
</gazebo>- 感谢你赐予我前进的力量
-
微信
- 支付宝